0x531 VAE
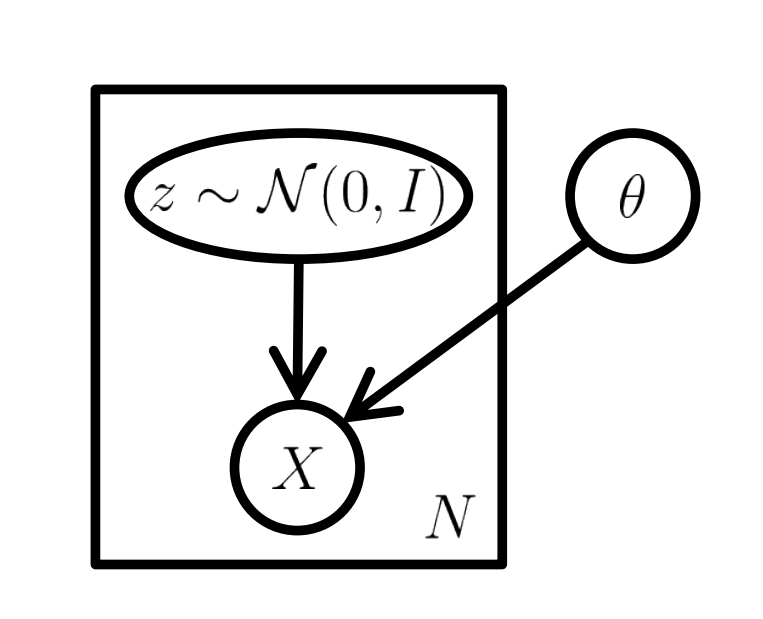
The idea behind the latent variable model is to assume a lower-dimensional latent space and the following generative process
We want to sample from the simple low-dimensional latent space \(Z\) easily (e.g: Gaussian), and maximize the evidence function over the dataset \(X \sim \mathcal{D}\)
The idea behind the latent variable model is to assume a lower-dimensional latent space and the following generative process
We want to sample from the simple low-dimensional latent space \(Z\) easily (e.g: Gaussian), and maximize the evidence function over the dataset \(X \sim \mathcal{D}\)
2.1. Vanilla VAE
VAE implement this idea with the following modeling
Model (\(P(Z)\)) the prior in VAE is
Note this is a fixed prior in contrast with the VQ-VAE's learnt prior
Model (\(P(X|Z)\)) likelihood is modeled using a a deep neural network function \(f(Z; \theta)\): VAE approximates \(X \approx f(Z; \theta)\) and measure \(P(X|Z)\) by penalizing using Gaussian distribution
if \(X\) is discrete, it can other discrete distribution penalty such as Bernouli)
Probabilistic PCA
Recall pPCA is a simplified version of VAE
and likelihoood function \(f\) is linear
The graphical model of VAE is
The integration of evidence is very expensive,
so we are maximizing the lower bound of evidence (ELBO) instead of the evidence itself
Recall the the standard ELBO form (RHS usually denoted \(\mathcal{L}(Q)\)) is
where the right hand expression is the ELBO, ELBO can be further decomposed into two terms
We model \(Q(Z|X)\) as
wherre \(\mu(X), \Sigma(X)\) is implemented using neural network.
Look at the formula again,
The first term on RHS has a sampling step \(z \sim Q\) which cannot backprogate. The training process can be done using the reparametrization trick where we sample \(\epsilon \sim N(0, I)\) and transform \(\epsilon\) to \(z\) (instead of sampling \(Z \sim Q\) directly)
The 2nd term is simple to compute
The likelihood function cannot be exactly calculated, only the lower bound could be provided
2.2. Posterior Collapse
VAE suffers from the posterior collapse problem when the signal from posterior \(Q(Z|X)\) is too weak or too noisy, it collapses towards the prior
where a subset of \(Z\) is not meaninfully used and it matches the uninformative prior
The decoder then starts ignoring it and generate sample without signal from \(X\), the reconstructed output becomes independent of \(X\)
Some works claims this is because of the KL term in the objective,
Most common approaches to solve these are either
- change objective
- weaken decoder
2.3. Architecture
Model (VAE-GAN) Attach a discriminator after encoder/decoder.
2.4. Loss
Model (\(\beta\)-VAE) attempts to learn an disentangle distribution with \(\beta > 1\)
Another approach to solve the posterior collapse problem
Model (\(\delta\)-VAE) prevent KL from falling to zero by constraining posterior \(Q\) and prior \(P\) such that they have a minimum distance \(KL > 0\)
A trivial choice is to set the Gaussian with a fixed different variance. For a non-trivial sequential model, they use non-correlated \(q\) and corelated prior AR(1)
There is a minimum distance because one is correlated and the other is not correlated
2.5. Vanilla VQ-VAE (Discrete Model)
Model (VQ-VAE) VQ uses the discrete latent variables instead of the continous one. It has a latent embedding \(e \in R^{KD}\) where \(K\) is the size of the discrete latent space and \(D\) is the hidden dimension.
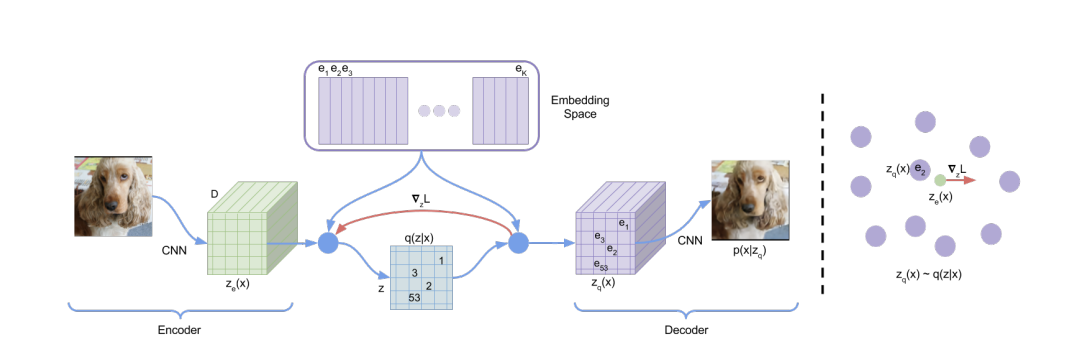
It models the posterior distribution as a deterministic categorical distribution
The loss function is
It consists of
- reconstruction loss: \(\log p(x|z_q(x))\)
- codebook loss: \(\| sg[z_e(x)] - e \|^2\), bringing codebook close to encoder output, can be replaced with EMA (exponential moving average) for stability
- commitment loss: $ |z_e(x) - sg[e] |^2$, encourages encoder output to be close to codebook
VAE vs VQ-VAE
VQ-VAE can be seen as a special case of VAE. The KL term in the original VAE disappears by assuming prior \(p(z)\) is uniform \(p(z=k) = 1/K\) and the proposal distribution \(q(Z=k|X)\) is deteterministic:
While training the model, the prior \(p(Z)\) is kept constant and uniform \(p(z=k)=1/K\),. After training, it can be fit to an autoregressive model over \(Z\), so that we can sample using ancestral sampling
In this work, they model the autoregressive latent prior using PixelCNN for image and WaveNet for raw audio
The experiment settings are interesting
Image settings:
- 128x128x3 -> 32x32x1 (K=512)
- 43 times reduction
Audio settings:
- encoder: 6 convolution with stride 2 and window 4 (K=512)
- 64 times reduction
- decoder: dilated convolutional architecture like the WaveNet decoder
Problems:
The VQVAE also has its own problem, namely, the low codebook usage due to poor codebook initialization.
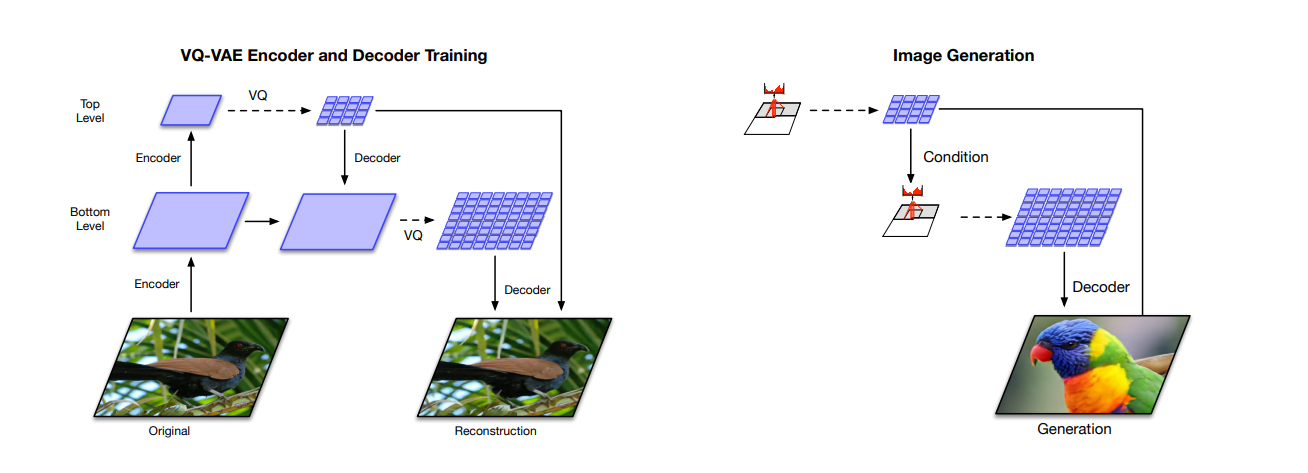
2.6. Hierarchical VQ-VAE
Model (Hierarchical VQ-VAE)
It has a hierarchical latent code
- top latent code models global information
- bottom latent code, conditioned on the top latent, models local information
256x256 images -> 64x64 (bottom) -> 32x32 (top)
Prior
- top prior: PixelCNN + multihead self attention to capture larger receptive field
- bottom prior: no self-attention