0x312 Continuous-Optimization
- 1. Foundation
- 2. Unconstrained Minimization
- 3. Equality Constrained Minimization
- 4. Inequality Constrained Minimization
- 5. Nonlinear Optimization
- 6. Reference
1. Foundation
1.1. Optimization Problems
Definition (optimization problems) The most general optimization problems is formulated as follows:
where \(f_0\) is the objective function, the inequality \(f_i(x) \leq 0\) is inequality constraints, the equation \(h_i(x)\) is called the equalit constraints.
Definition (optimal value, optimal point) The optimal value \(p^*\) is defined as
We say \(x^*\) is an optimal point if \(x^*\) is feasible and
The set of optimal points is the optimal set, denoted
If there exists an optimal point for the porblem, the problem is said to be solvable.
Definition (local minimum) Let \(f: D \subset \mathbb{R}^n \to \mathbb{R}\). We say \(f\) has a local minimum of \(f(a)\) at point \(a\) in D if there exists an open ball with radius \(\epsilon\) such that
To find the global extrema, divide the domain into subdomain and gather their critical points to find the actual global extrema. The existence of global extrema can be guaranteed by the continuous function and compact domain as mentioned in the previous section.
1.1.1. Unconstrained Optimization
First derivate test can be used to find all interior critical points for local extremum.
Theorem (First derivative test, Fermat) Let \(f\) be a differentiable function from \(D \subset \mathbb{R}^n \to \mathbb{R}\), suppose \(f\) has a local extremum \(f(a)\) at the interior point \(a\), then the first partial derivatives of \(f\) are zero at \(A\)
To decide the actual extremum within the candidates, the second derivative test is required.
Theorem (Second derivative test) Let \(f \in C^{3}\) in an open set of \(\mathbb{R}^n\) containing \(a\). If \(\nabla f(a)=0\) and Hessian is positive definite at \(a\), then \(f\) has a local minimum at \(a\).
1.1.2. Equality Constrained Optimization
In the equality constraint optimization,
We can use the Lagrange Multiplier to find critical points.
Theorem (Lagrange Multiplier) Any constrained critical point of the function \(f\) on the domain \(D=\{ g = 0 \}\) must be a point \(a\) satifying either of
- \(f\) is not differentiable at \(a \in D\)
- \(\nabla g(a) = 0\)
- \(\nabla f(a) = \lambda \nabla g(a)\)
The second condition is called the degeneracy condition, and the last condition is the Lagrange condition.

1.1.3. Inequality Constrained Optimization
In the inequality constraint optimization,
There are two types of solutions:
-
The constraint could be slack or loose, meaning there is no force is needed to keep \(\theta\) from violating the constraint, in this case \(\nabla f=0\) like any unconstrained problems, regardless of what \(\nabla g\) is
-
The constraint could be binding or tight, meaning \(g(\theta) = 0\), in this case the constraint can exert nonzero force on \(\theta\), and we need to find a force cancel out the objective gradient
Theorem (complementary slackness)
The 3rd condition is called the complementary slackness encoding the possible cases.
1.2. Convex Optimization Problems
Definition (convex optimization problem) A convex optimization problem is one of the ofrm
where all \(f_i\) are convex functions.
Lemma (local optimal point is global optimal) in convex optimization problem, a local optimal point is also globally optimal. \(x\) is local optimal when there exists a \(R > 0\) such that
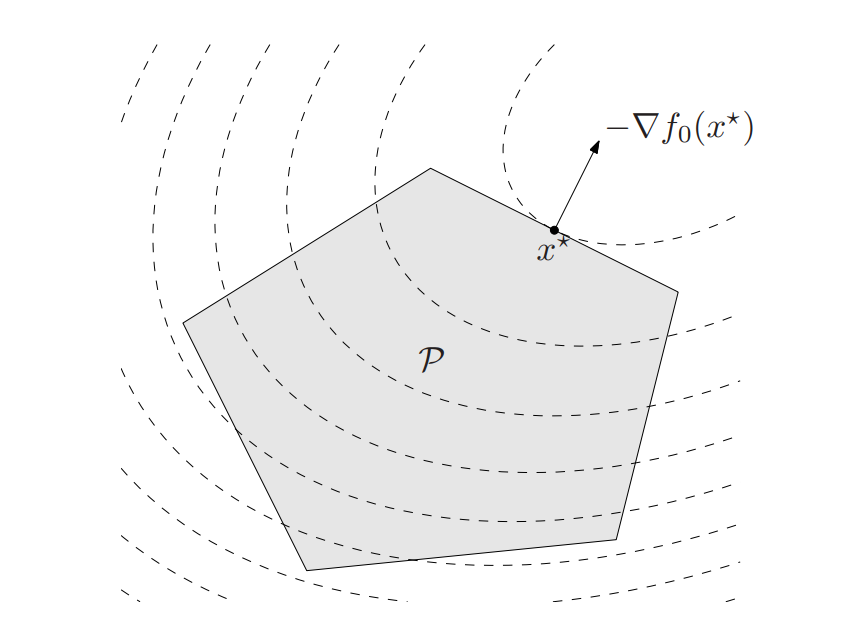
criterion (optimality) \(x\) is optimal iff for all \(y \in X\) in feasible set
The criterion reduces to the following one if not constrained:
derivation of special case of Lagrange multiplier
Suppose we want to minimize \(f_0(x)\) subject to \(Ax = b\).
when feasible, suppose the optimal point is \(x\) (which is feasible), then the feasible set can be written as \(y = x+v\) where \(v\) is the null space of \(A\) (i.e: \(N(A)\)). The given criterion can be written as
The inequality over a subspace indicates zero therefore for all \(v\), \(\nabla f_0(x)^Tv = 0\) and \(\nabla f_0(x) \perp N(A)\) indicates \(\nabla f_0(x) \in R(A^T)\), which indicates there exists a \(v\) such that
This is the classical Lagrange multiplier optimality condition
Problem (Quasiconvex optimization) One general approach to quasiconvex optimization is to represent the sublevel sets of a quasiconvex function via a family of convex inequalities:
\(f_0(x) \leq t \iff \phi_t(x) \leq 0\)
where \(\phi_t(x)\) is a nonincreasing convex function. By solving the feasibility problem using binary search, we can efficiently solve the quasiconvex problem.
1.3. Linear Optimization Problems
Definition (linear program, LP) A general linear program has the form
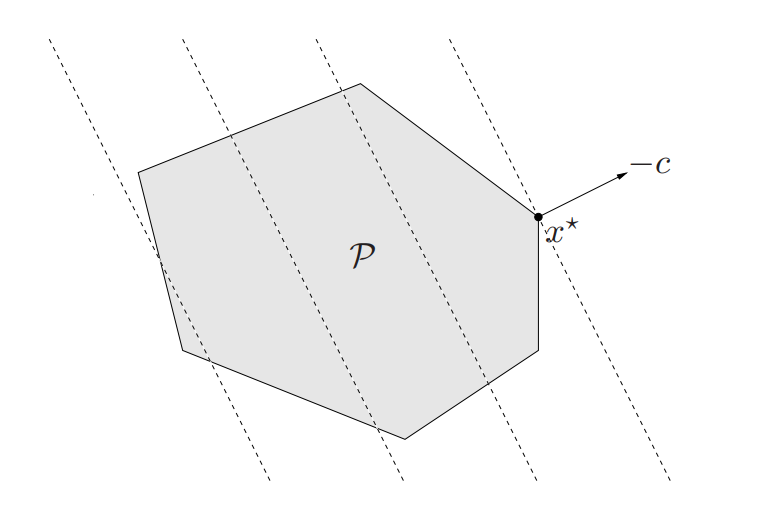
The geometric interpretation is the problem is to minimize the affine function \(c^Tx+d\) over a polyhedron \(P\)
Definition (standard form LP) The standard form LP only has the inequalities that are a componentwise nonnegative:
The general LP can be transformed into standard form by introducing nonngative slack variables \(Gx \preceq h \implies Gx + s=h\)(transform inequalities to equalities) and break \(x=x^+ - x^-\) to enforce nonnegativies.
diet problem
We want to creat a diet containing \(m\) nutrients at least \(b_1, ..., b_m\) by purchasing foods \(x_1, ..., x_n\) nonnegative units. Each food \(j\) has \(a_{i,j}\) of \(i\) nutrient and has a \(c_j\) cost. We want to find the cheapest prices that satisfies the nutritional requirements
Here are some interesting history about this problem.
1.4. Quadratic Optimization Problems
Definition (quadratic program, QP) A convex optimization problem is called quadratic program if the objective function is quadratic and the constraint functions are affine
where \(P \in S^n_+\). In a quadratic program, we minimize a convex quadratic function over a polyhedron. Linear program is a special case of QP by setting \(P=0\)
Definition (Quadratically constrainted quadratic program, QCQP) Both objective function and inequality constraint function are quadratic
QCQP minimize a convex quadratic function over a feasible region that is the intersection of ellipsoids
Definition (second-order cone program, SOCP)
SOCP is more general than QCQP
1.5. Geometric Programming
Definition (monomials) A function \(f: R^n \to R\) with domain \(R^n_{++}\) defind as
is called a monomial function
Definition (posynomial function) A sum of monomials with \(K\) terms is a posynomial function
Definition (Geometric programming) An optimization problem with the following form is called geometric program
where \(f_0, ..., f_m\) are posynomials and \(h_1, ..., h_p\) are monomials
1.6. Generalized Inequality Problems
Generalized inequality problems generalizes the scalar inequality constraint (i.e: \(Ax \leq b\)) to vector-inequality constraint (i.e: \(Ax \preceq_K b\))
Definition (conic program) Conic form program have a linear objective and one generalized inequality constraint
Definition (semidefinite programming, SDP) When \(K \in S^k_{+}\), the cone of positive semidefinite matrics, the associated conic form problem is called a semidefnite program (SDP)
where \(G, F_i \in S^k\)
Definition (standard form SDP) A standard form SDP has linear equality constraints, and a nonnegativity constraint on the variable \(X \in S^n\)
where \(C, A_i \in S^n\)
SOCP is a special case of SDP
The SOCP can be expressed as a conic form problem where the inequality can be converted to
where \(K_i = \{ (y,t) | \|y\|_2 \leq t \}\) is the second order cone
1.7. Vector Optimization
The vector optimization problem generalizes the scalar objective to vector objective wrt \(K\)
2. Unconstrained Minimization
The unconstrained optimization problem is
where \(f\) is convex and twice continuously differentiable. A necessary and sufficient condition for a point \(x^*\) to be optimal is
Sometimes this is analytically solvable, but usually must be solved by an interative algorithm \(x^{(0)},x^{(1)},...\) with \(f(x^{(k)}) \to p^*\)
For the iterative methods, we require a feasible starting point \(x^{(0)}\) in the domain, the sublevel set must be closed.
In much of the section, we assume the objective function is strongly convex, which means there exists an \(m > 0\) such that
It provides a lower-bound
By optimizing the right side, we can see
It also gives the bound of \(x\)
By observing \(S\) is compact and maximum eigenvalue of \(\nabla^2 f(x)\) is continuous function, by the extreme value theorem, there exists a upper bound \(M > 0\)
which leads to
2.1. Descent Methods (1st ordeer)
Step 1: A direction in a descent method must satisfy
This is called descent direction
Step 2: line search, find the step size \(t\) along the line \(\{ x + t \Delta x | t \in R_+ \}\)
Algorithm (Exact Line Search) we solve the line search problem by
Algorithm (Backtracking Line Search) given two constant \(\alpha, \beta\), shrink the step size \(t = \beta t\) until
2.1.1. Gradient Descent
The descent direction is
Gradient descent can be interpreted via a quadratic approximation.
where the Hessian \(\nabla^2f(x)\) is approximated with \(I/t\). Setting \(f(y) = 0\) gives as \(x^+ = x - t \nabla f(x)\)
In the exact line search, the convergence is given by
where \(c = 1-m/M < 1\).
It shows that iteration number depedns on how good the initial point is \(f(x^{(0)}) - p^*)\) and it increase linearly with increasing \(M/m\) (which is an bound on the condition number of hessian)
It is converges as fast as a geometric series, in this context, it is called linear convergence
In the backtracking line search, the convergence analysis is similar where
The convergence is at least as fast as a geometric series, it is called at least linear
2.1.2. Steepest Descent Method
Defintion (normalized steepest descent direction) The normalized steepest descent direction is
Definition (unnormalized steepest descent direction) The unnormalized version is
It is not difficult to see both of them are descent direction
2.2. Newton's Method (2nd order)
The newton step is
PSD of \(\nabla^2 f(x)\) implies this is a descent direction.
2.2.1. Saddle Free Newton
This work argues proliferation of saddle points, not local minima, especially in high dimensional problems of practical interest. It proposes a Newton approach which escape high dimensional saddle points.
2.3. Quasi Newton (2nd order)
Recall the Gradient descent approximate hessian by \(I\), while the Newton method compute hessian exactly. We want something in the middle.
Hessian is expensive to compute, Instead of computing directly, we approximate Hessian using curvature information along the trajectory.
The approximation is done by solving the following optimization
subject to
where the 2nd constraint is the secant equation where \(s_k = x_{k+1} - x_k\), \(y_k = \nabla f(x_{k+1}) - \nabla f(x_k)\)
Different norm gives different solution
2.3.1. BFGS
This video is good
As the Newton direction is the inverse Hessian \(\nabla^2 f(x)^{-1}\), we want to approximate the inverse \(H_k\) instead of \(B_k\). By rewriting the previous optimization problem, we obtain
subject to
In BFGS, we use the weighted Frobenius norm where weight is defined as
It turns out that \(H_k\) is easy to update iteratively (rank-2 update) using
where \(\rho_k = 1/y_k^T s_k\)
2.3.2. L-BFGS
2.4. Conjugate Gradient
3. Equality Constrained Minimization
3.1. Unconstrained Problem
For constrained minimization problem with a given set \(\mathcal{Q} \subset R^n\), we want to
The solution has to be in the \(\mathcal{Q}\)
3.1.1. Projected Gradient Descent
See this slide
Model (projected gradient descent) Consider a constrained set \(\mathcal{Q}\), starting from an initial point \(x_0 \in \mathcal{Q}\), PGD iterates the following until the stop condition is met:
where \(P_\mathcal{Q}\) is the projection operator and itself is also an optimization problem
PGD is an economic algorithm is the projection to \(\mathcal{Q}\) is easy to compute (e.g: projection into subspace, see projection section in matrix note)
if \(\mathcal{Q}\) is a convex set, then it is an convex optimization problem and thus has a unique solution
PGD is a special case of proximal gradient
Proximal gradient is a method to optimize sum of differentiable function and non-differentiable function. PGD can be interpreted as
where the 2nd term is the nondiferentiable indicator function.
4. Inequality Constrained Minimization
5. Nonlinear Optimization
6. Reference
[1] Boyd, Stephen, Stephen P. Boyd, and Lieven Vandenberghe. Convex optimization. Cambridge university press, 2004.